मॉडुलन एक गैर-रेखीय विद्युत प्रक्रिया है जिसमें एक सिग्नल (वाहक) के मापदंडों को दूसरे सिग्नल (मॉड्यूलेटिंग, सूचना) का उपयोग करके बदला जाता है। संचार प्रौद्योगिकी में, आवृत्ति, आयाम और चरण मॉडुलन का व्यापक रूप से उपयोग किया जाता है। पावर इलेक्ट्रॉनिक्स और माइक्रोप्रोसेसर प्रौद्योगिकी में, पल्स-चौड़ाई मॉडुलन व्यापक हो गया है।
विषय
पीडब्लूएम (पल्स चौड़ाई मॉडुलन) क्या है
मूल सिग्नल के पल्स-चौड़ाई मॉडुलन के साथ, मूल सिग्नल का आयाम, आवृत्ति और चरण अपरिवर्तित रहता है। सूचना संकेत की कार्रवाई के तहत आयताकार नाड़ी की अवधि (चौड़ाई) परिवर्तन के अधीन है। अंग्रेजी तकनीकी साहित्य में, इसे PWM - पल्स-चौड़ाई मॉडुलन के रूप में संक्षिप्त किया गया है।
पीडब्लूएम कैसे काम करता है
पल्स चौड़ाई मॉड्यूलेटेड सिग्नल दो तरह से बनता है:
- अनुरूप;
- डिजिटल।
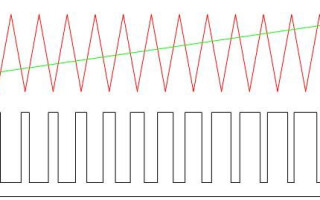
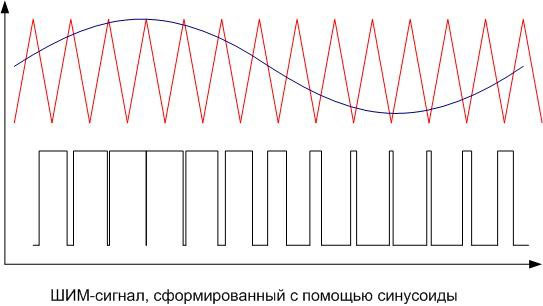
पीडब्लूएम सिग्नल बनाने की एनालॉग विधि के साथ, एक वाहक को सॉटूथ या त्रिकोणीय सिग्नल के रूप में एक इनवर्टिंग को खिलाया जाता है तुलनित्र इनपुट, और सूचना - नॉन-इनवर्टिंग पर। यदि तात्कालिक वाहक स्तर मॉड्यूलेटिंग सिग्नल से अधिक है, तो तुलनित्र का आउटपुट शून्य है, यदि कम है - एक। आउटपुट एक असतत संकेत है जिसकी आवृत्ति वाहक त्रिभुज या आरा की आवृत्ति के अनुरूप होती है, और एक पल्स लंबाई मॉड्यूलेटिंग वोल्टेज के स्तर के समानुपाती होती है।
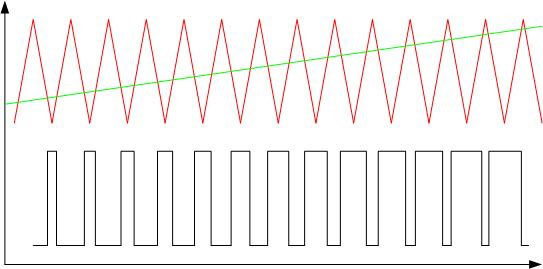
एक उदाहरण के रूप में, त्रिकोणीय सिग्नल की पल्स चौड़ाई मॉड्यूलेशन रैखिक रूप से बढ़ रहा है। आउटपुट दालों की अवधि आउटपुट सिग्नल के स्तर के समानुपाती होती है।
एनालॉग पीडब्लूएम नियंत्रक तैयार किए गए माइक्रोक्रिकिट्स के रूप में भी उपलब्ध हैं, जिसके अंदर एक तुलनित्र और एक वाहक पीढ़ी सर्किट स्थापित हैं। बाहरी आवृत्ति-सेटिंग तत्वों को जोड़ने और सूचना संकेत की आपूर्ति के लिए इनपुट हैं। शक्तिशाली विदेशी कुंजियों को नियंत्रित करने वाले आउटपुट से एक सिग्नल हटा दिया जाता है। फीडबैक के लिए इनपुट भी हैं - सेट नियंत्रण मापदंडों को बनाए रखने के लिए उनकी आवश्यकता होती है। उदाहरण के लिए, TL494 चिप है। उन मामलों के लिए जहां उपभोक्ता की शक्ति अपेक्षाकृत कम है, पीडब्लूएम नियंत्रकों में अंतर्निहित चाबियां उपलब्ध हैं। LM2596 microcircuit की आंतरिक कुंजी को 3 एम्पीयर तक के करंट के लिए डिज़ाइन किया गया है।
डिजिटल पद्धति को विशेष माइक्रोक्रिकिट्स या माइक्रोप्रोसेसरों का उपयोग करके किया जाता है। नाड़ी की लंबाई आंतरिक कार्यक्रम द्वारा नियंत्रित होती है। लोकप्रिय PIC और AVR सहित कई माइक्रोकंट्रोलर में PWM "ऑन बोर्ड" के हार्डवेयर कार्यान्वयन के लिए एक अंतर्निहित मॉड्यूल है, PWM सिग्नल प्राप्त करने के लिए, आपको मॉड्यूल को सक्रिय करने और इसके संचालन मापदंडों को सेट करने की आवश्यकता है।यदि ऐसा कोई मॉड्यूल उपलब्ध नहीं है, तो PWM को विशुद्ध रूप से सॉफ्टवेयर द्वारा व्यवस्थित किया जा सकता है, यह मुश्किल नहीं है। यह विधि आउटपुट के लचीले उपयोग के माध्यम से अधिक शक्ति और स्वतंत्रता देती है, लेकिन अधिक नियंत्रक संसाधनों का उपयोग करती है।
पीडब्लूएम सिग्नल के लक्षण
PWM सिग्नल की महत्वपूर्ण विशेषताएं हैं:
- आयाम (यू);
- आवृत्ति (एफ);
- कर्तव्य चक्र (एस) या कर्तव्य चक्र डी।
वोल्ट में आयाम लोड के आधार पर निर्धारित किया जाता है। इसे उपभोक्ता का रेटेड आपूर्ति वोल्टेज प्रदान करना होगा।
पल्स चौड़ाई द्वारा संशोधित सिग्नल की आवृत्ति निम्नलिखित विचारों से चुनी जाती है:
- आवृत्ति जितनी अधिक होगी, नियंत्रण सटीकता उतनी ही अधिक होगी।
- आवृत्ति पीडब्लूएम द्वारा नियंत्रित डिवाइस के प्रतिक्रिया समय से कम नहीं होनी चाहिए, अन्यथा नियंत्रित पैरामीटर के ध्यान देने योग्य तरंगें उत्पन्न होंगी।
- आवृत्ति जितनी अधिक होगी, स्विचिंग हानि उतनी ही अधिक होगी। यह इस तथ्य से उत्पन्न होता है कि कुंजी का स्विचिंग समय सीमित है। बंद अवस्था में, सभी आपूर्ति वोल्टेज मुख्य तत्व पर गिर जाता है, लेकिन लगभग कोई करंट नहीं होता है। खुली अवस्था में, पूर्ण भार धारा कुंजी के माध्यम से प्रवाहित होती है, लेकिन वोल्टेज ड्रॉप छोटा होता है, क्योंकि थ्रूपुट प्रतिरोध कुछ ओम होता है। दोनों ही मामलों में, बिजली अपव्यय नगण्य है। एक राज्य से दूसरे राज्य में संक्रमण जल्दी होता है, लेकिन तुरंत नहीं। अनलॉकिंग-लॉकिंग की प्रक्रिया में, आंशिक रूप से खुले तत्व पर एक बड़ा वोल्टेज गिरता है और साथ ही साथ एक महत्वपूर्ण धारा प्रवाहित होती है। इस समय, विलुप्त शक्ति उच्च मूल्यों तक पहुंच जाती है। यह अवधि कम है, कुंजी के पास महत्वपूर्ण रूप से गर्म होने का समय नहीं है।लेकिन प्रति इकाई समय अंतराल की आवृत्ति में वृद्धि के साथ, यह अधिक हो जाता है, और गर्मी की कमी बढ़ जाती है। इसलिए चाबियाँ बनाने के लिए तेज तत्वों का उपयोग करना महत्वपूर्ण है।
- जब ड्राइविंग करें विद्युत मोटर आवृत्ति को एक व्यक्ति के लिए श्रव्य क्षेत्र से दूर ले जाना पड़ता है - 25 kHz और उससे अधिक। क्योंकि कम पीडब्लूएम आवृत्ति पर, एक अप्रिय सीटी आती है।
ये आवश्यकताएं अक्सर एक-दूसरे के विरोध में होती हैं, इसलिए कुछ मामलों में आवृत्ति का चुनाव एक समझौता है।
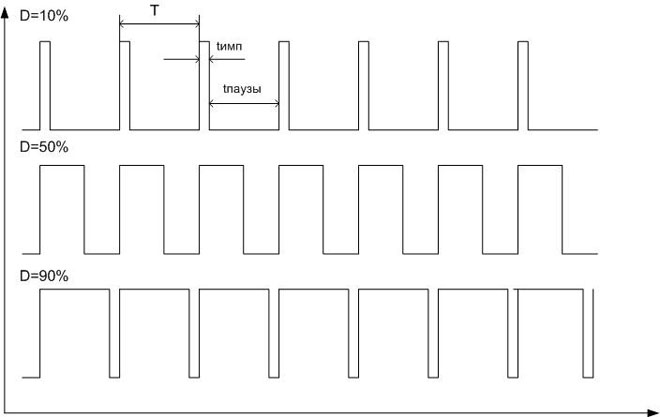
मॉड्यूलेशन मान कर्तव्य चक्र की विशेषता है। चूंकि नाड़ी पुनरावृत्ति दर स्थिर है, इसलिए अवधि की अवधि भी स्थिर है (T=1/f)। अवधि में एक आवेग और एक विराम होता है, जिसकी अवधि क्रमशः होती है, tछोटा सा भूत और टीरुक जाता है, और टीछोटा सा भूत+टीरुक जाता है= टी. कर्तव्य चक्र नाड़ी की अवधि और अवधि का अनुपात है - S \u003d tछोटा सा भूत/टी। लेकिन व्यवहार में यह पारस्परिक मूल्य का उपयोग करने के लिए अधिक सुविधाजनक निकला - भरण कारक: डी = 1 / एस = टी / टीछोटा सा भूत. भरण कारक को प्रतिशत के रूप में व्यक्त करना और भी सुविधाजनक है।
पीडब्लूएम और एसआईआर में क्या अंतर है
विदेशी तकनीकी साहित्य में पल्स-चौड़ाई मॉडुलन और पल्स-चौड़ाई विनियमन (पीडब्लूआर) के बीच कोई अंतर नहीं है। रूसी विशेषज्ञ इन अवधारणाओं के बीच अंतर करने की कोशिश कर रहे हैं। वास्तव में, पीडब्लूएम एक प्रकार का मॉड्यूलेशन है, अर्थात, दूसरे के प्रभाव में वाहक सिग्नल में परिवर्तन, एक को संशोधित करना। वाहक सिग्नल सूचना के वाहक के रूप में कार्य करता है, और मॉड्यूलेटिंग सिग्नल इस जानकारी को सेट करता है। और पल्स-चौड़ाई विनियमन पीडब्लूएम का उपयोग करके लोड मोड का विनियमन है।
पीडब्लूएम के कारण और अनुप्रयोग
पल्स चौड़ाई मॉडुलन के सिद्धांत का प्रयोग किया जाता है शक्तिशाली अतुल्यकालिक मोटर्स के गति नियंत्रक. इस मामले में, समायोज्य आवृत्ति मॉड्यूलेटिंग सिग्नल (एकल-चरण या तीन-चरण) कम-शक्ति साइन लहर जनरेटर द्वारा उत्पन्न होता है और एक एनालॉग तरीके से वाहक पर लगाया जाता है। आउटपुट एक पीडब्लूएम सिग्नल है, जिसे आवश्यक शक्ति की चाबियों को खिलाया जाता है। फिर आप कम-पास फिल्टर के माध्यम से दालों के परिणामी अनुक्रम को पारित कर सकते हैं, उदाहरण के लिए, एक साधारण आरसी सर्किट के माध्यम से, और मूल साइनसॉइड का चयन करें। या आप इसके बिना कर सकते हैं - इंजन की जड़ता के कारण निस्पंदन स्वाभाविक रूप से होगा। जाहिर है, वाहक आवृत्ति जितनी अधिक होगी, आउटपुट तरंग उतना ही अधिक मूल साइनसॉइड के करीब होगा।
एक स्वाभाविक प्रश्न उठता है - जनरेटर के सिग्नल को तुरंत बढ़ाना असंभव क्यों है, उदाहरण के लिए, शक्तिशाली ट्रांजिस्टर का उपयोग करना? क्योंकि लीनियर मोड में काम करने वाला रेगुलेटिंग एलिमेंट लोड और की के बीच पावर का पुनर्वितरण करेगा। इस मामले में, प्रमुख तत्व पर महत्वपूर्ण शक्ति बर्बाद हो जाती है। यदि एक शक्तिशाली नियंत्रण तत्व एक कुंजी मोड (ट्रिनिस्टर, ट्राइक, आरजीबीटी ट्रांजिस्टर) में संचालित होता है, तो समय के साथ शक्ति वितरित की जाती है। नुकसान बहुत कम होगा, और दक्षता बहुत अधिक होगी।
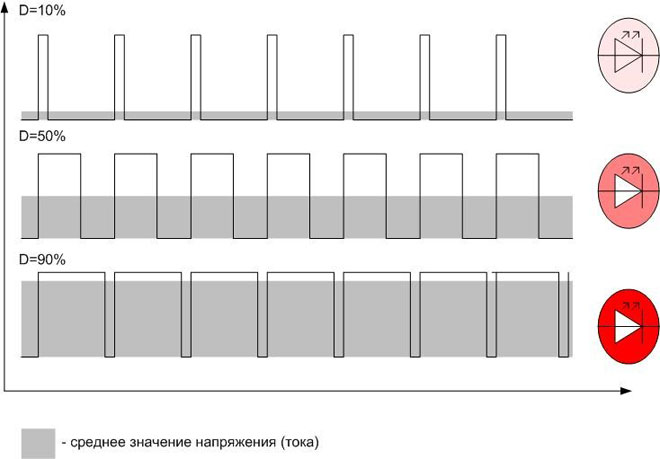
डिजिटल तकनीक में, पल्स-चौड़ाई विनियमन का कोई विशेष विकल्प नहीं है। सिग्नल का आयाम वहां स्थिर है, वोल्टेज और करंट को केवल वाहक को पल्स चौड़ाई के साथ संशोधित करके और बाद में इसे औसत करके बदला जा सकता है। इसलिए, PWM का उपयोग उन वस्तुओं पर वोल्टेज और करंट को विनियमित करने के लिए किया जाता है जो पल्स सिग्नल को औसत कर सकते हैं। औसत विभिन्न तरीकों से होता है:
- लोड जड़ता के कारणइस प्रकार, थर्मोइलेक्ट्रिक हीटर और गरमागरम लैंप की थर्मल जड़ता नियंत्रित वस्तुओं को दालों के बीच ठहराव में ध्यान से ठंडा नहीं होने देती है।
- धारणा की जड़ता के कारण। एलईडी के पास नाड़ी से नाड़ी तक जाने का समय है, लेकिन मानव आंख इस पर ध्यान नहीं देती है और इसे अलग-अलग तीव्रता के साथ निरंतर चमक के रूप में मानती है। इस सिद्धांत का उपयोग एलईडी मॉनिटर के डॉट्स की चमक को नियंत्रित करने के लिए किया जाता है। लेकिन कई सौ हर्ट्ज की आवृत्ति के साथ अगोचर निमिष अभी भी मौजूद है और आंखों की थकान का कारण बनता है।
- यांत्रिक जड़ता के कारण। इस संपत्ति का उपयोग ब्रश डीसी मोटर्स के नियंत्रण में किया जाता है। विनियमन की सही ढंग से चयनित आवृत्ति के साथ, मोटर के पास मृत ठहराव में धीमा होने का समय नहीं है।
इसलिए, पीडब्लूएम का उपयोग किया जाता है जहां वोल्टेज या करंट का औसत मूल्य निर्णायक भूमिका निभाता है। उल्लिखित सामान्य मामलों के अलावा, पीडब्लूएम विधि वेल्डिंग मशीन और बैटरी चार्जर आदि में औसत धारा को नियंत्रित करती है।
यदि प्राकृतिक औसत संभव नहीं है, तो कई मामलों में इस भूमिका को पहले से उल्लिखित लो-पास फिल्टर द्वारा लिया जा सकता है (एलपीएफ) एक आरसी श्रृंखला के रूप में। व्यावहारिक उद्देश्यों के लिए, यह पर्याप्त है, लेकिन यह समझा जाना चाहिए कि विरूपण के बिना कम-पास फिल्टर का उपयोग करके पीडब्लूएम से मूल सिग्नल को अलग करना असंभव है। आखिरकार, पीडब्लूएम स्पेक्ट्रम में अनंत संख्या में हार्मोनिक्स होते हैं जो अनिवार्य रूप से फिल्टर के पासबैंड में आते हैं। इसलिए, किसी को पुनर्निर्मित साइनसॉइड के आकार के बारे में भ्रम नहीं बनाना चाहिए।
बहुत कुशल और प्रभावी पीडब्लूएम आरजीबी एलईडी नियंत्रण। इस उपकरण में तीन p-n जंक्शन हैं - लाल, नीला, हरा।प्रत्येक चैनल की चमक की चमक को अलग-अलग बदलकर, आप एलईडी चमक के लगभग किसी भी रंग (शुद्ध सफेद के अपवाद के साथ) प्राप्त कर सकते हैं। पीडब्लूएम के साथ प्रकाश प्रभाव पैदा करने की संभावनाएं अनंत हैं।
पल्स चौड़ाई मॉड्यूलेटेड डिजिटल सिग्नल का सबसे आम अनुप्रयोग लोड के माध्यम से बहने वाले औसत वर्तमान या वोल्टेज को नियंत्रित करना है। लेकिन इस प्रकार के मॉडुलन का गैर-मानक उपयोग भी संभव है। यह सब डेवलपर की कल्पना पर निर्भर करता है।
इसी तरह के लेख: